钠离子电池,正式“上车”|焦点分析
文 | 吕雅宁
编辑 | 苏建勋
钠离子电池产业化再次迈出关键一步。
2023年尾,钠离子电池领域接连两日传来“上车”消息:
2023年12月27日,中科海钠宣布,公司与江淮钇为联合推出的钠电版花仙子电动车已于当日下线,预计2024年1月开始批量交付,这也是全球首款钠离子电池量产车。
2023年12月28日,孚能科技与江铃集团新能源汽车合作推出的首款钠离子电池纯电A00级车型,也正式下线。
过去两年中,全球锂资源的持续紧缺与价格高企,让钠离子电池作为一种锂电的替代选择,快速收割了一波市场热度。2023年更被业内称作“钠离子电池元年”,新兴的钠电企业频获融资,锂电企业、整车厂也都相继布局钠离子电池领域。
2023年2月,中科海钠与思皓新能源联合发布行业首台钠离子电池试验车;3月,雅迪发布搭载钠电池的两轮车;4月,宁德时代宣布,其钠离子电池将首发落地奇瑞车型。直到年底,钠离子电池终于实现量产装车。
不到一年时间,钠离子电池“上车”走完了试验、验证到首次量产的过程,可谓神速。
但危机也相伴而生,随着锂价自去年下半年起大幅下跌,明显削弱钠离子电池的成本优势,使其在刚步入产业化前夜时就遇上一盆冷水。当产业化曙光遇上成本之争,钠离子电池何以分庭抗“锂”?

中科海钠与江淮钇为联合推出的钠电版花仙子电动车。图源:中科海钠
风口上的钠离子电池
钠离子与与锂元素有着相似“出身”,属于同一主族元素,因此具备相似的物理化学性质,在电池工作中均表现出“摇椅式”的电化学充放电行为。
锂离子电池和钠离子电池的研发工作基本同时开始,均始于20世纪70年代。但当时受制于技术瓶颈以及性能差距,钠离子电池长期停留在实验室阶段,未能广泛应用。
自2021年开始,锂价一路飙升,陪跑三十年的钠离子电池终于走上台前,迎来爆发期。
从制造工艺角度看,钠离子电池可以与锂电池的生产设备、工艺兼容,锂电池厂商可以通过切换产线快速布局产能。在锂价持续攀升的态势下,钠离子电池成为锂电池在某些场景下的替代方案。
再者,相比于紧缺的锂矿资源,全球钠资源储量更加丰富。我国钠资源储量也明显占优势,约为占据全球储量的22%。再加上我国锂资源的对外依存度还非常高,出于不被“卡脖子”的战略考虑,发展钠电更是必要之举。
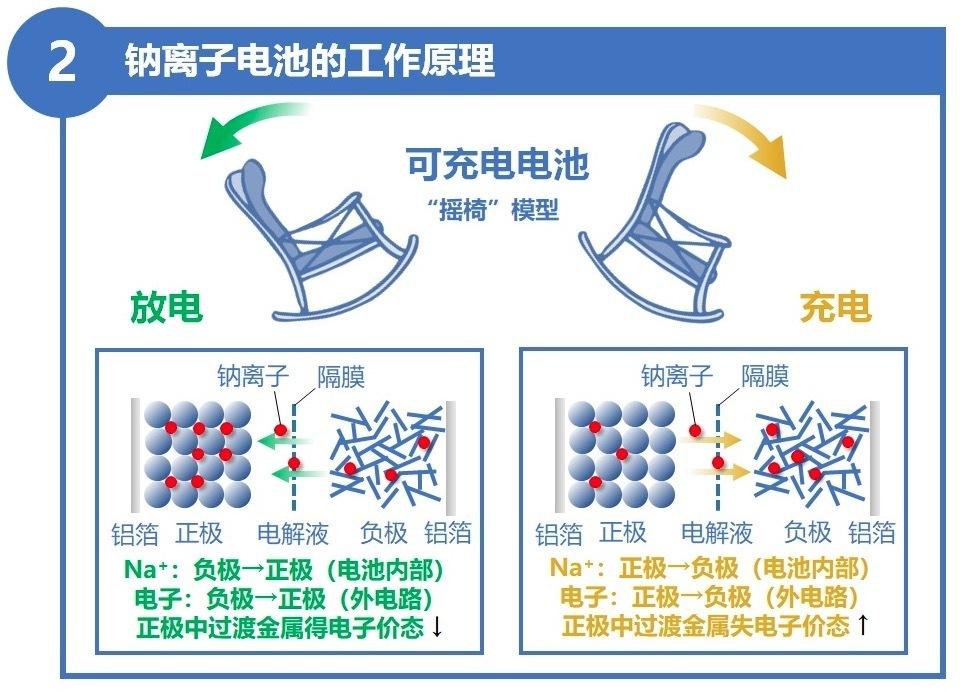
钠离子电池工作原理。图片来源:中科海钠
从电池性能本身来看,钠离子电池的安全稳定性是其突出优势。特别在高低温性能方面,钠离子电池的工作温度范围更广,可以在-40℃到80℃的温度区间正常工作,在-20℃的环境下容量保持率接近90%,优于锂电池。
同时,钠离子电池的内阻比锂离子电池高,在短路情况下瞬时发热量少,温升较低,热失控温度高于锂电池,更不易产生起火、爆炸等安全隐患。
2023年,钠离子电池利好消息不断。无论是传统锂电池厂商还是新兴锂电池厂商都相继加大布局,钠离子电池在研发和产业化进程中消息不断。
宁德时代、亿纬锂能、鹏辉能源、华洋股份、容百科技等电池厂商相继推公布钠离子电池以及电极材料规划,并表示将致力于钠电上下游的产业化。整车厂方面,比亚迪、江淮、江铃、奇瑞等国内车企,以及多家海外车企,也均表示将在乘用车市场导入钠离子电池。
据高工产研统计,目前钠离子电池产业链布局企业数量已超过100家。2023年至2025年,钠离子电池企业有效产能将分别达到19GWh、25GWh、60GWh。

2023年4月19日,上海车展,宁德时代展出钠离子电池。图源:视觉中国
但钠离子电池仍有核心短板,即能量密度。由于钠离子的半径比锂离子大,相同质量下的钠离子所蕴含能量相对较低,这使得钠离子电池的能量密度与锂电相比有先天劣势。这也决定了钠电的应用领域,必然会先锁定在“对能量密度要求较低”的场景中。
此次全球首批下线的两款钠离子电池车,也均定位为低续航的短途车型。
根据新闻资料,中科海钠与江淮钇为联合推出的钠电版花仙子电动车,车型续航里程为252公里。孚能科技与江铃集团推出的钠离子电池纯电A00级车型——江铃易至EV3(青春版),续航里程为251公里。
“钠离子电池技术成熟后,肯定会分食掉磷酸铁锂市场中的一部分蛋糕,例如微型电动车这部分,未来将是钠电的天下。” 真锂研究创始人、总裁墨柯向36碳表示。
在二轮车、三轮车领域,墨柯认为钠离子电池将会抢走铅酸电池的份额,因为在成本相当的情况下,钠电能量密度比铅酸电池更高,有望取代铅酸电池。
“钠电成熟的时候,基本上就是铅酸电池走到尽头的时候。”墨柯说。
另外,钠离子电池在储能领域也有用武之地。基于钠离子电池优异的低温效能、循环性能,未来在户用储能、工商业储能等对安全性要求高的场景下,钠离子电池也有望成为锂电的重要补充。
锂价暴跌之后,钠电未火先衰?
如果说钠离子电池的兴起,是乘了“锂价疯涨“的东风,那么如今锂价暴跌,也必然会削减钠离子电池的势头。
2023年,碳酸锂价格的全年跌幅超过80%,进而造成锂电池电芯成本急剧下滑,这一波动幅度放在整个大宗商品市场中都尚属罕见。
1月4日,根据上海钢联发布的数据,电池级碳酸锂的均价报10.1万元/吨。而去年此时,电池级碳酸锂的价格约在50万元/吨。产能过剩局面下,锂价下跌趋势还将延续,直到建立新的供需平衡。
跌跌不休的碳酸锂价格,无疑给刚火起来的钠离子电池带来一记暴击。
“如果碳酸锂价格达20万元/吨时,钠离子电池的边际成本可领先24%左右;如果碳酸锂价格下探到10万元/吨时,钠离子电池的边际成本领先12%左右;而如果碳酸锂价格回归到5万元/吨,钠离子电池仅领先约5%的边际成本。” 浙江青钠董事长王子煊在2023年4月召开的高工钠电峰会上表示。
在锂价占据高位的前两年,钠离子电池作为缓解“锂价成本焦虑”的新技术,迅速成为“香饽饽”。但所谓“成也萧何,败也萧何”,当锂价快速下跌时,钠电的成本优势则不再明显。
“到了今年,明显感到钠离子电池的讨论热度降了些,主要是锂价跌得太狠了。”一位业内人士向36碳表示。
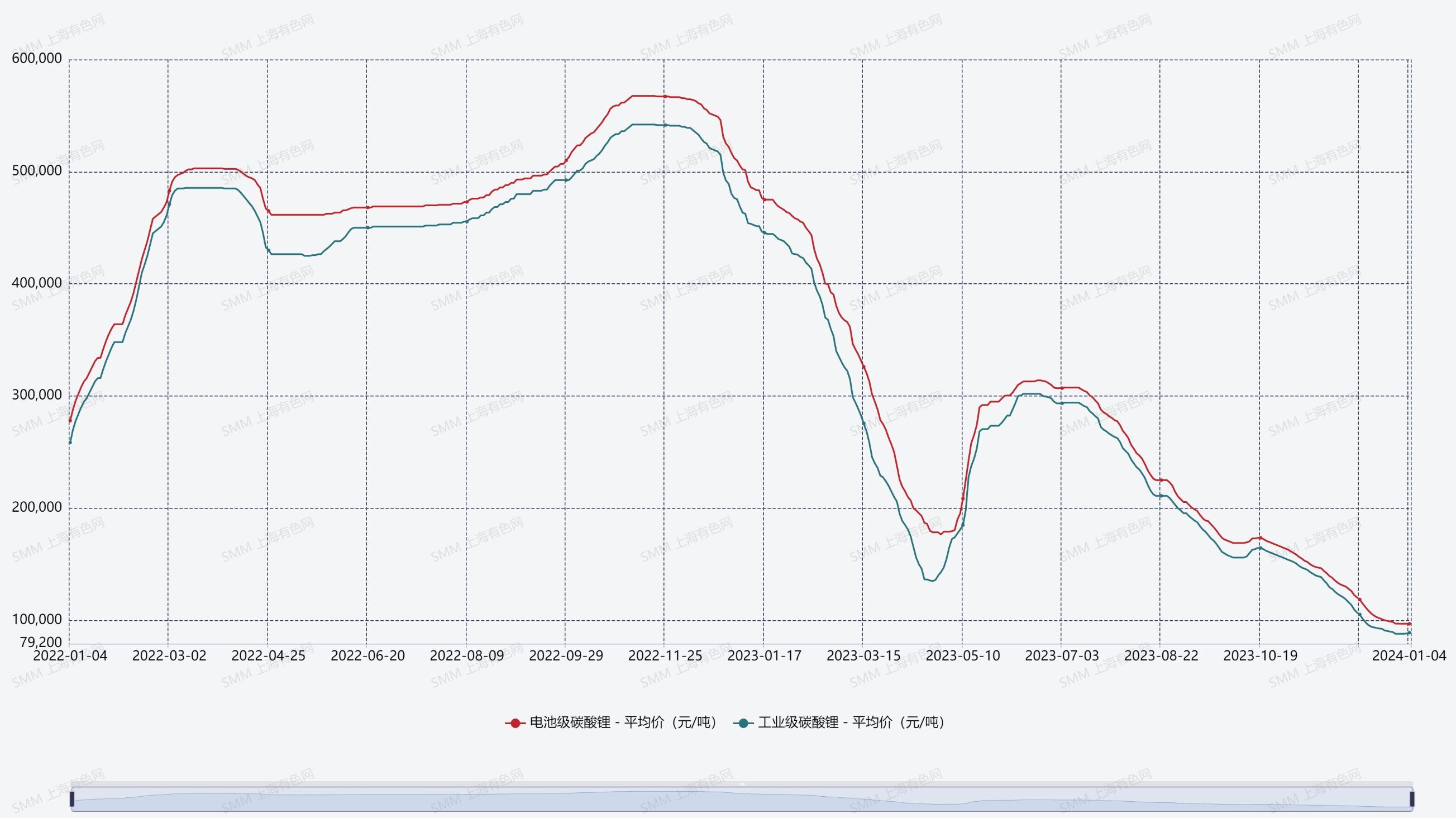
近两年的碳酸锂价格走势图。图源:上海有色网
1月4日,六氟磷酸锂行业龙头多氟多就在互动平台表示,公司目前已完成钠离子电池研发体系的搭建,并建设了钠离子电池中试产线。目前碳酸锂大幅下跌导致钠离子电池的成本优势减弱,公司推迟了商业化生产的进度,但研发和降本仍在全力推进。
上海有色网钠电分析师黄梦丹预测,由于锂价大幅下跌,今年钠电企业的实际产量可能会比规划中少,市场预期会相对更谨慎。但从长期看,结合锂钠差异化竞争、宏观战略考虑等因素,钠离子电池仍有极大市场空间,量产趋势肯定是不会变的。
当前钠离子电池仍处于研发向产业化过渡的阶段。尽管钠电可以兼容使用锂电生产设备,但产业尚未形成健全的供应链。特别是电池材料体系,还尚未取得行业共识,各厂商在技术路径的选择中也是百家争鸣。
黄梦丹告诉36碳,目前钠离子电池还未形成稳定的工艺路线和原材料选择,正极材料以层状过渡金属氧化物、普鲁士蓝(白)类化合物、聚阴离子化合物三种主流路线,负极材料以硬碳为主。不同材料体系下,不同钠电企业的产品也会有性能差异。各家仍处于各自探索阶段,都在寻找一条最优路线。
墨柯也认为,钠离子电池实现量产的主要突破点是在材料体系。特别是以硬碳为主的电池负极材料,钠电与锂电交集不多,基本都需要重新开发。
“钠电负极材料目前受到无主流碳源原料的限制。如今行业内较成熟的是采用生物质碳作为负极材料,例如秸秆、椰壳等。但若要大规模应用时,这些生物质原料的来源、成本都是需要解决的问题。”他说。
另外,能量密度低仍是钠电需要突破的难点。虽然钠离子电池可以优先攻下能量密度要求较低的场景。但对于任何电池技术来说,若要进一步扩大市场规模,提升能量密度肯定是必须要做的事。
当来自外部锂价的助推力明显减弱,未来将是考验钠电产品力的时刻。这也倒逼钠电玩家们加快内部的技术迭代与验证,以求在钠电市场格局形成前占得先机。
“未来两年仍是锂价的低价周期,钠离子电池基本不会取得成本优势。但就电池技术本身,这两年正是钠电的发展窗口期,也就是练‘内功’的阶段。企业需把握这两年时间把技术成熟度做上去,把成本降下来,同时还要做好市场验证工作。等到锂价走入下一个上升周期时,就是钠电腾飞之时。”墨柯说。
哀大莫过于心死 凉透人心失望的句子
哀伤之痛因人而异,或因生病爱人远离,或为钱财被亲人所骗,又或是父母不养小、老而尽索之……心伤了、泪干了,痛至麻木时,哀变成了盾,任你剑戟棍枪,心静如水,波澜不惊。哀大莫过于此,有伤却无痛了……善而错付的伤似乎谁也逃不过……心死了,事却未了。止损才是重点,如何止损呢?大财经2023-03-24 03:04:070000湖南裕能:2024年正极材料行业可能将面临出清
每经AI快讯,湖南裕能接待调研时表示,新能源行业前景广阔,预计2024年行业整体将继续保持增长。在过去的一年,正极材料行业竞争激烈,叠加结构性产能过剩,所以2024年行业可能将面临出清,行业整体盈利水平也可能面临一定压力,对此,公司已积极采取了各类降本措施,不断加强成本控制。同时,公司坚定看好正极材料发展前景,相信机会与挑战并存,将更加注重产品品质和研发创新,持续保持核心竞争优势。每日经济新闻0000山东第一大企业“揭晓”:收入超过8300亿元,遥遥领先海尔、海信
2023年11月消息:2023山东省综合百强企业正式公布。今年榜单入围门槛为238.40亿元,较上一年提升1.19亿元。总营收达到79388.12亿元,同比增长了7.7%。从产业分布来看,共有74家工业企业入围,主要集中在石油及化工、食品及农产品、钢铁、汽车及零部件等行业。从企业性质来说,有57家民营企业上榜,其中8家跻身TOP20。大财经2023-11-15 12:10:310000为什么说,马云套现,是意味着一个时代的结束?
(原创不易,已开启全网自动维权,请勿抄袭搬运!)马云减持1000万股阿里巴巴股票,不仅引起舆论一片哗然,也让阿里巴巴股价应声下跌9.4%,人们不仅会问:不缺钱的马云,为什么这么干?此时,阿里刚刚公布了今年三季度的财报,数据非常亮眼:营收同比上涨8.5%,净利润同比上涨19%。这也是阿里系高层大换血、由蔡崇信执掌帅印之后,市场给出的强劲反馈。形势一片大好,马云却为何要在背后“捅刀子”?大财经2023-11-21 11:32:3000011月10日工商银行最新存款利率:工商银行5万一年利息多少钱?
当前在工商银行可以存活期、存定期、买国债等,不少储户都很想了解工商银行最新存款利率情况,今天就来盘点一下工商银行2024年1月10日最新存款利率,并且在工商银行5万元一年利息多少钱。一、活期活期存款是可以随时支取的存款方式,具有流动性高的特点。不过利率非常低。当前工商银行活期年化利率为0.2%,5万元的本金,一年可以获得利息:5万元*0.2%*1=100元。大财经2024-01-10 12:17:590000